在线直播 博士研究生李博博在数学领域国际知名期刊发表研究成果
近日,在线直播 博士研究生李博博在数学领域国际知名期刊《Chaos, Solitons & Fractals》(影响因子5.6,中科院一区TOP)上发表题为“Adaptive-based generalized asymptotic outer synchronization control for heterogeneous complex dynamic networks with double time-varying delays”的研究成果,李博博为第一作者,指导老师钟令枢副教授为通讯作者,在线直播 为论文第一单位。该研究针对具有未知动态连接、多维不确定参数及双重时变时延的异维复杂动态网络(HCDN)的广义渐进外同步控制问题,提出了一种由节点控制器、有界时变增益和自适应律组成的自适应同步控制方案(ASCS),使得具有不同拓扑结构的驱动-响应网络在节点间连接边完全不可利用的条件下实现了广义渐进外同步,且外同步现象涌现时网络节点间耦合连接依旧存在而非断开。该成果为复杂动态网络存在多种时延扰动、参数未知、连接不明等复杂工况下的同步调控提供了一种兼具完备性与鲁棒性的理论控制策略。
研究创新
1、本研究构建了含双重时变时延与多维不确定参数向量的异维复杂动态网络模型,该模型由驱动与响应动态网络构成,且二者网络节点维度不匹配,既放宽了传统研究对节点维度的约束,又提升了模型的通用性。
2、相较于现有相关控制策略,既摒弃了对节点间连接边可利用或可观测的假设,也不依赖于满足耦合耗散条件或正向连接的连接边,仅利用节点状态变量和自适应律完成控制设计,使所提出的自适应同步控制方案具备更高的理论价值。
3、基于非线性映射而非线性映射的广义渐近外同步控制方法被提出,这对于具有非一致拓扑结构的异维复杂动态网络具有更广泛的应用场景
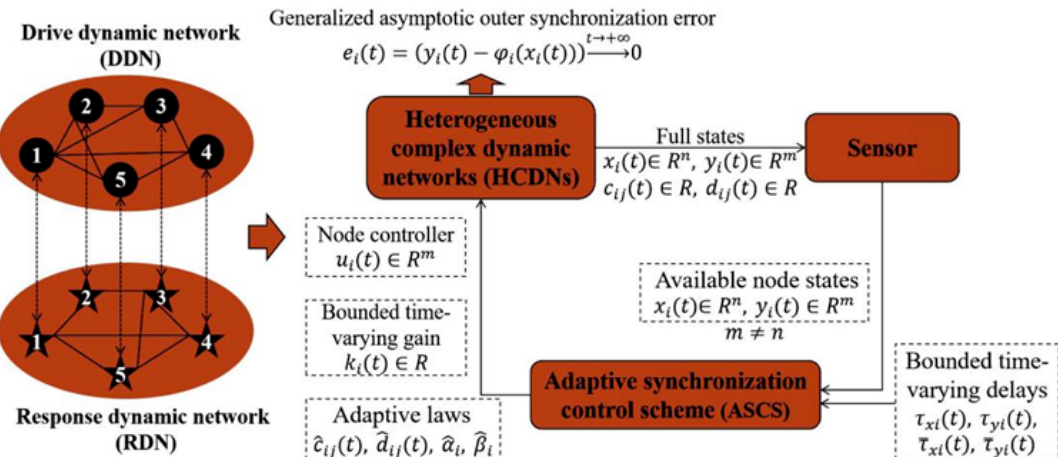
图1 HCDN和ASCS结构框架
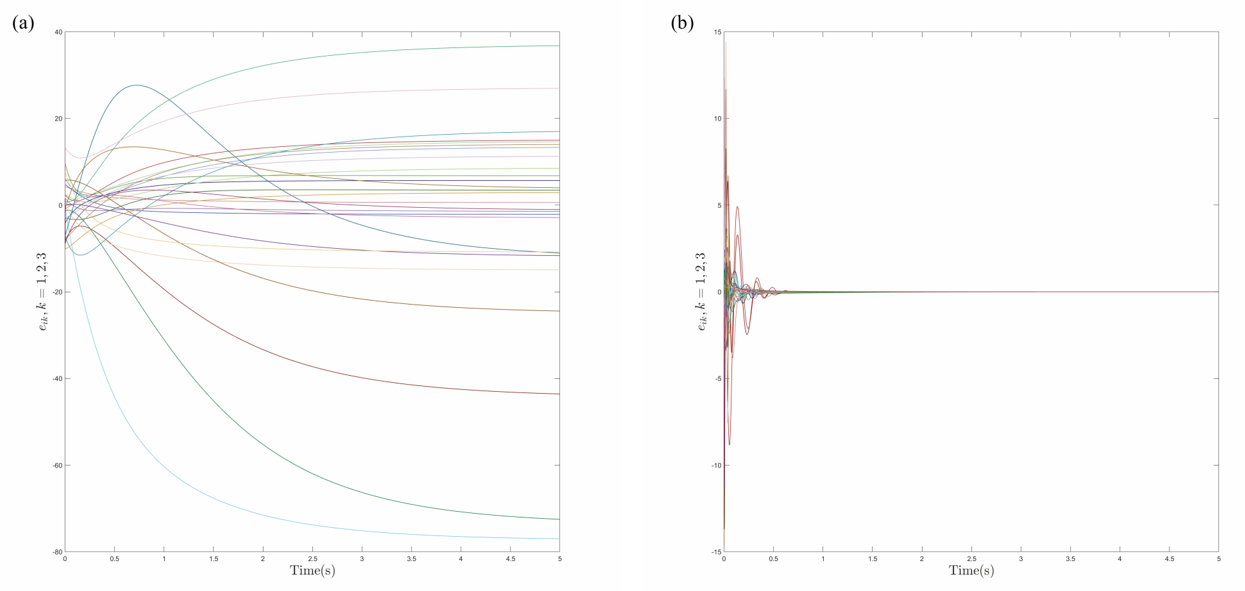
图2 广义渐进外同步误差仿真结果
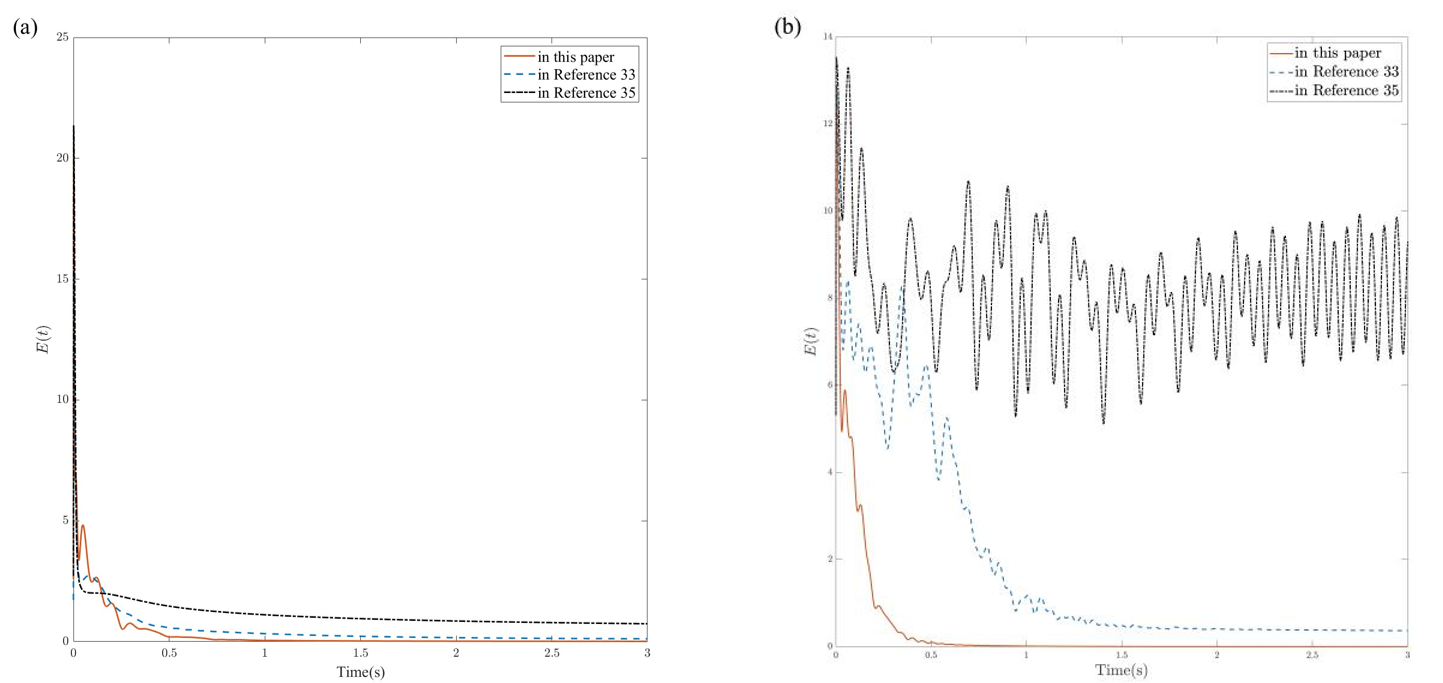
图3 不同实例下对比仿真结果
研究展望
该成果为具有多种不确定性的网络化系统稳定性分析与控制设计提供了新的研究方法与思路。研究团队将以此为切入点,围绕海上风电场无人机巡检展开网络建模研究,以适配海上通信时延、故障发生、环境扰动引发的参数未知等问题,实现巡检无人机异构集群的精准同步控制,同时为巡检路径优化提供鲁棒的网络动态调控支撑。
论文链接:
//www.sciencedirect.com/science/article/pii/S0960077926001438